




상세설명
개념
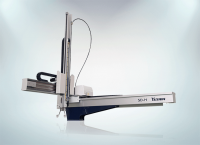
수직형 성형기의 런너취출대응 콤팩트설계로봇
취출 암에 서보 모터 구동의 관절 기구를 적용.
기존 에어실린더 구동 타입에 비해 훨씬 콤팩트한 설계를 실현.
수직형 성형기의 런너 취출에 공간을 절약하여 대응 가능.
주요 특징
공간 절약
콤팩트 설계에 의한 공간 절약화
기존의 수직형 성형기용 런너 취출 로봇에 비해 기장이 약 절반 이하인데도 금형 센터에서 스플 런너 개방위치까지의 수평 이동 거리는 최대 1380mm를
확보했습니다.
안정된 고속 동작
취출 암에 서보 모터 구동 적용.
서보 모터 구동의 관절 암을 갖춰 성형기로부터의 로봇 본체의 돌출 면적을 최소화하여 성형기의 반 조작측 가까이에 분쇄기 등의 설치가 가능합니다.
또 취출타임의 단축도 실현했습니다.




