

상세설명
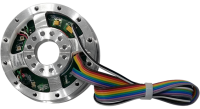
3축 힘 센서 ( Fx, Fy, Fz )이며 Multi-Axis ( 2축∼6축 Fx, Fy, Fz, Mx, My, Mz ) 가능 하며 최대 6축 FORCE/TORQUE SENSOR 설계 변경 가능.
로봇의 끝단 Assembly로 사용 가능하며 불규칙한 주물 버거 제거용 센서로 사용.
3축은 각축의 Amplifier PCB Module 형(각 축의 출력 : ± 0∼10 V DC )으로 개발.


3축 힘 센서 ( Fx, Fy, Fz )이며 Multi-Axis ( 2축∼6축 Fx, Fy, Fz, Mx, My, Mz ) 가능 하며 최대 6축 FORCE/TORQUE SENSOR 설계 변경 가능.
로봇의 끝단 Assembly로 사용 가능하며 불규칙한 주물 버거 제거용 센서로 사용.
3축은 각축의 Amplifier PCB Module 형(각 축의 출력 : ± 0∼10 V DC )으로 개발.




