





IGM 로봇 주변
로봇은 수직 또는 매달린 위치로 로봇 주변에 장착됩니다. 트랙 시스템의 외부 축은 제어 시스템에 NC 축으로 완전히 통합되어 로봇의 작업 영역을 크게 확장합니다.
단일 축으로 또는 최대 3 개의 포지셔닝 장치와 결합하여 다양한 회전 및 선형 장치를 사용할 수 있습니다. 여러 로봇이 트랙 축을 공유 할 수도 있습니다. 세로축의 위치 결정 범위는 최대 100m 이상입니다.
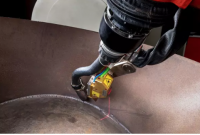
IGM 공작물 주변
공작물 주변은 공작물을 고정, 위치 지정 및 이동합니다. 외부 축은 NC 축으로 제어 시스템에 완전히 통합되며 수동 제어 기능도 갖추고 있습니다. 용접 단계를 실행하는 동안 공작물 조작에 외부 축이 포함될 수 있습니다. 티치 펜던트를 사용하여 로봇 축과 함께 프로그래밍됩니다.
다양한 로터리 모듈을 단일 축으로 사용하거나 최대 25,000kg 이상의 부하 용량으로 최대 3 개의 축과 결합 할 수 있습니다.
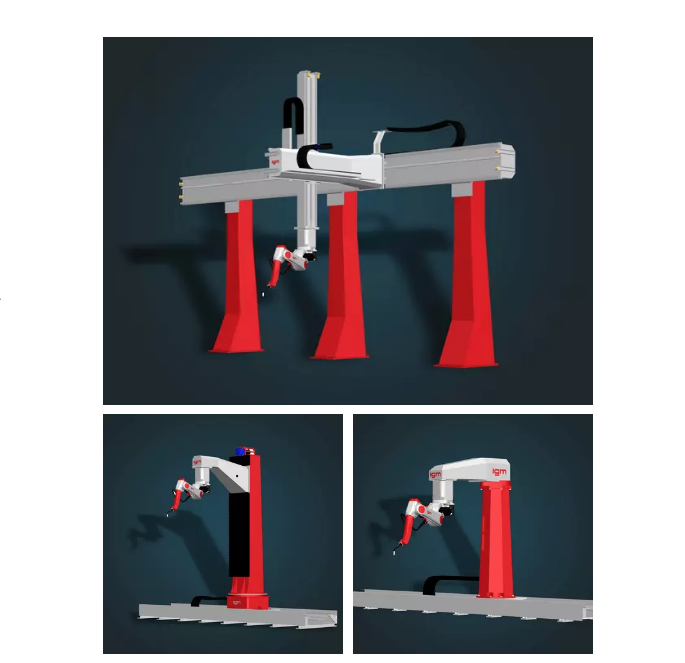
IGM 포털 시스템
igm은 개별 애플리케이션에 맞게 맞춤화 된 대규모 부품 용접을위한 포털 갠트리 시스템을 제공합니다. 포털 갠트리 시스템은 3 ~ 25m의 트랙 게이지에서 최대 6m 스트로크의 수직 트랙이 있습니다.
하나 또는 두 개의 로봇이 포털에 장착 될 수 있습니다. 포털 축은 로봇 제어 시스템에 의해 제어되기 때문에 용접 단계를 실행하는 동안 포지셔닝에도 사용할 수 있습니다.
표준 포털 디자인에는 AC 서보 모터가있는 양면 랙 드라이브, 대규모 레일에 통합 된 에지 가이드 제어 기능이있는 안정적인 휠 하우스, 이동 제어 캐비닛, 전원 및 요청시 제어 데스크가 포함됩니다.




