




IGM 가스 노즐 검색-위치 감지 용 촉각 센서
이 촉각 센서는 공작물 표면을 측정하여 공작물 위치 또는 부품 및 개별 부품을 결정하는 데 사용됩니다. 각각의 경우 프로그램의 연속 부분은 결정된 편차에 따라 이동합니다.
센서 이동은 임의의 양의 개별 포인트, 용접 프로그램의 전체 섹션 또는 전체 프로그램의 수정에 적용될 수 있습니다. 아크 솔기 감지와의 조합이 가능합니다. 제어 시스템은 위치 변경에 따라 프로그램의 이동, 회전 및 기울기를 지원합니다.
가스 노즐 자체는 센서로 사용됩니다. 이를 통해 복잡한 공작물 및 좁은 공간에서도 용접 이음 부의 위치를 결정하는 공작물의 기준 표면에서 필요한 검색 단계를 수행 할 수 있습니다. 가스 노즐이 공작물에 닿 자마자 토출되고 로봇은 즉시 정지합니다. 이 방전은 제어 캐비닛의 각 센서 보드에 의해 온라인으로 기록되고 로봇은 다음 검색 드라이브로 이동합니다.
아크 심 감지-필렛 및 V 심의 정밀 용접
용접 프로세스 동안 아크 심 감지는 용접 심의 위치 공차를 보상하는 데 사용됩니다.
특수 소프트웨어 및 특별히 설계된 하드웨어를 통해 필렛 및 V 자형 조인트의 "실제"이음새 위치는 측정 된 데이터를 처리하여 계산되며, 아크 위빙은 원래 프로그래밍 된 지점을 실제 이음새로 해당 이동을 제공합니다. 위치. 이 아크 심 감지 기술은 단일 또는 탠덤 응용 프로그램을 사용하여 짧은 아크, 스프레이 아크 및 펄스 아크 용접과 같은 전체 범위의 용접 전송에 사용할 수 있습니다. 용접 토치는 솔기 조인트의 경로를 정확히 따라갑니다.
이 프로세스는 가스 노즐 감지와 결합하여 유리할 수 있습니다. 여기에서 각 용접 이음새의 시작 지점이 센서에 의해 감지되고 원하는 튀어 나온 상태로 올바른 위치에서 아크가 점화됩니다.
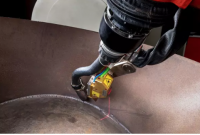
IGM 레이저 카메라 ICAM
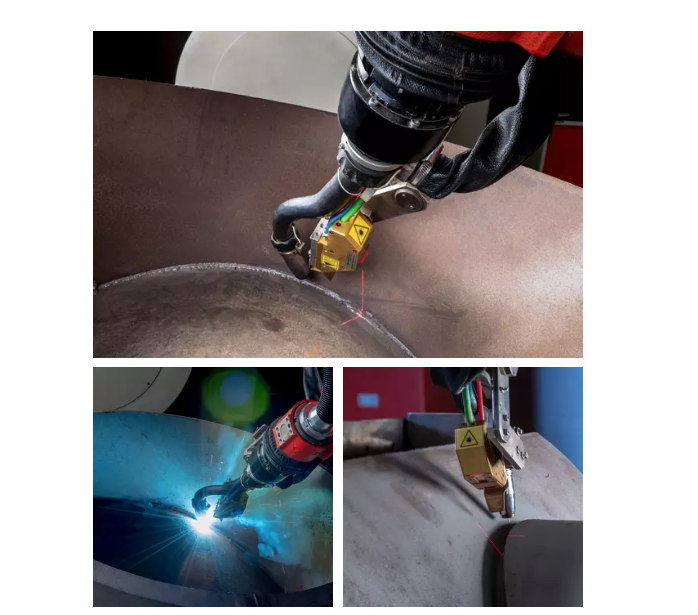
로봇이 항상 올바른 방향을 찾을 수 있도록 매우 효과적인 소형 레이저 카메라가 사용됩니다. 다양한 용접 이음 유형을 추적하고, 감지 된 간격을 식별 및 측정하고, 부피 변화에 대한 온라인 보상을 위해 설계되었습니다.
카메라 설계는 동기화 된 레이저 스캔 기술을 기반으로하며, 고속 안정성, 크고 프로그래밍 가능한 작업 공간, 깊은 가시 범위, 주변 광 및 반사에 대한 견고 함을 특징으로합니다. 고주파수 및 자기장에 대한 비수 동성은 거친 조건에서 많은 산업 공정에 이상적인 장치입니다.
The igm laser camera iCAM is mounted on the wrist axis of the robot. It measures the position and volume of the weld groove online and adjusts the robot movement and the welding parameters accordingly. For the application with welding in narrow workpiece ranges, the camera can be automatically deposited and readopted during the welding program. This laser camera iCAM, developed by igm, offers as an outstanding feature the complete integration into the robot control. Thus programming is done with the igm teach pendant K6 without the need for an additional PC. The user benefits from the wide range of languages, European as well as Asian ones, being supported by the robot software. By means of the logging function, the whole joint geometry can be displayed, indicating gaps and volumes. A live view of the measuring field is given by grey scale value image.
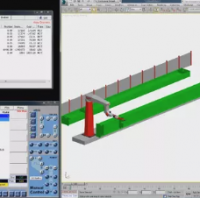
IGM 레이저 센서 ILS-C
igm 레이저 센서 iLS-C는 가장자리 또는 간격을 검색해야하는 경우에 유용합니다. 센서는 실제 공작물 위치와 원래 위치 사이의 편차를 감지하도록 고안되었습니다. 이동은 3D 모드뿐만 아니라 병렬로 계산되어 높이 및 너비 편차를 효과적으로 보정합니다.
기존의 촉각 센서와 비교하여이 레이저 센서는 높은 검색 속도를 사용하고 단일 검색 경로에서 동시에 높이와 측면 위치를 감지하여 비생산적인 시간을 줄여줍니다. 잘 설계된 티치 펜던트는 쉬운 프로그래밍을 지원합니다. 처리 알고리즘에 대한 특별한 지식이 필요하지 않습니다.
iLS-C는 일반적으로 시트 두께 및 / 또는 접근성으로 인해 촉각 감지가 불가능한 경우에 적용됩니다.
감지는 로봇 토치가있는 센서를 검색 할 이음새를 가로 질러 움직여 시작됩니다. 항상 전체 검색 시퀀스가 수행 된 다음 이미지가 분석됩니다. 따라서 피크, 이상한 값 (거울 효과) 또는 기생 물체 (스패 터 형성 및 파편)와 같은 간섭을 식별하고 필터링 할 수 있습니다. 검색 할 이음새 유형을 검색 순서에 지정해야합니다. 센서는 특정 로봇 매개 변수에 따라 감지 된 지점의 절대 위치를 계산하고 데이터를 로봇 제어 시스템으로 전송합니다.