



- Robonet : 네트워크 운영 및 원격 액세스
- ISDES 내장 : 용접 이음 부 및 운영 데이터 수집 시스템
- Smartstep : 로봇 프로그램 생성
- iPAT : 로봇 프로그램의 조작 및 조립
- i4i : 시스템 상태 시각화
로보 넷
네트워크 운영 및 임의 PC에서 로봇 제어로의 원격 액세스를위한 igm 소프트웨어
- 하나 이상의 컴퓨터로 데이터 전송
- 용접 및 작동 데이터의 원격 모니터링
- 노트북 또는 PC에서 볼 수있는 티치 펜던트 디스플레이
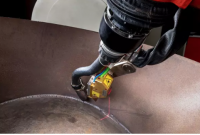
ISDES 포함
ISDES EMBEDDED는 용접 프로세스의 모니터링, 문서화 및 품질 보증은 물론 부분 또는 완전 자동화 용접 로봇 시스템에서 작동 데이터 평가를위한 용접 이음 및 작동 데이터 수집 시스템입니다. 제어 시스템에 통합 된 ISDES는 품질 및 운영 관련 데이터에 결정적인 매개 변수를 기록, 모니터링 및 평가할 수있는 가능성을 제공합니다.
isdes 임베디드 함수
- 컨트롤러에 직접 통합> 티치 펜던트의 매개 변수화
- 저장된 iSDES 데이터는 Excel에서 추가 처리 가능
- 데이터 처리는 사용자가 PC에서 수행 할 수 있습니다.
- 용접 데이터를 프로그램 단계에 자동 할당
- 제어 캐비닛에 통합 된 외부 센서
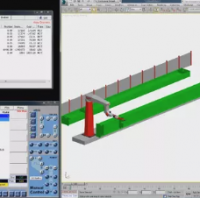
SMARTSTEP
Smartstep은 프로그램 조립을 통해 템플릿으로 대화 형 단계 프로그램을 생성하는 igm 로봇 제어용 소프트웨어 제품입니다.
로봇 프로그램 개발을위한 시간과 비용은 특히 작은 배치 크기의 경우 본질적으로 중요합니다. Smartstep은 라이브러리에 준비되고 저장되는 이전에 생성 된 프로그램 부품의 조립을위한 쉬운 대안을 제공합니다. 대화 형 입력 창으로 실행 가능한 로봇 프로그램을 구축 할 수 있습니다.
Smartstep은 주로 제한된 양의 반복적 인 이음새가있는 공작물을 프로그래밍하는 데 사용됩니다.
IPAT (IGM 프로그램 조립 도구)
iPAT (igm Program Assembly Tool)는 오프라인 조작 및 단계 프로그램 (템플릿 프로그램)의 조립에 사용할 수있는 매우 강력한 도구입니다. iPAT는 공작물 길이 및 위치 변경과 관련된 수치 값을 입력 할 수 있습니다.
iPAT의 목표는 템플릿 프로그램을 대상 프로그램에 연결하는 것입니다. 이 과정에서 특정 단계 범위는 템플릿 프로그램에서 가져 와서 로봇이나 트랙에서 이동되며 간단한 입력 대화 상자를 통해 대상 프로그램에 함께 복사됩니다. iPAT는 하나의 단일 단계 프로그램 내에서 교대에도 사용할 수 있습니다.
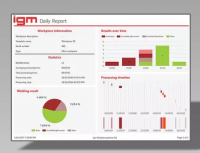
I4I 시각화 소프트웨어
i4i는 로봇 셀의 상태에 대한 다양한 시각화 및 보고서를 제공합니다. PLC 인터페이스를 사용하면 기계에 쉽게 연결할 수 있습니다. 또한 PC, 태블릿 또는 스마트 폰과 같은 다양한 장치를 통합 할 수 있습니다. 현재 프로그램뿐만 아니라 실제 런타임 및 남은 런타임과 관련된 상태를 가진 모든 로봇 스테이션을 한 눈에 볼 수 있습니다.
또한 상태 보고서와 함께 각 로봇 셀의 라이브 디스플레이를 시각화 할 수 있습니다. 공작물 추적 도구는 비상 전략을 포함한 모든 처리 단계에서 공작물 개발을 보여줍니다. 제조 공정의 결정적인 분석을 위해 SQL 데이터베이스는 다양한 평가 가능성을 제공합니다. 예를 들어, 기계의 가용성과 오류 가능성, 교대 / 시간당 생산성을 계산할 수 있습니다. 사용자 인터페이스는 로봇 셀의 시운전 중에 설정되며 모든 표준 기능을 유지하면서 사용자 요구에 따라 개별적으로 조정됩니다.
뒤