





상세설명
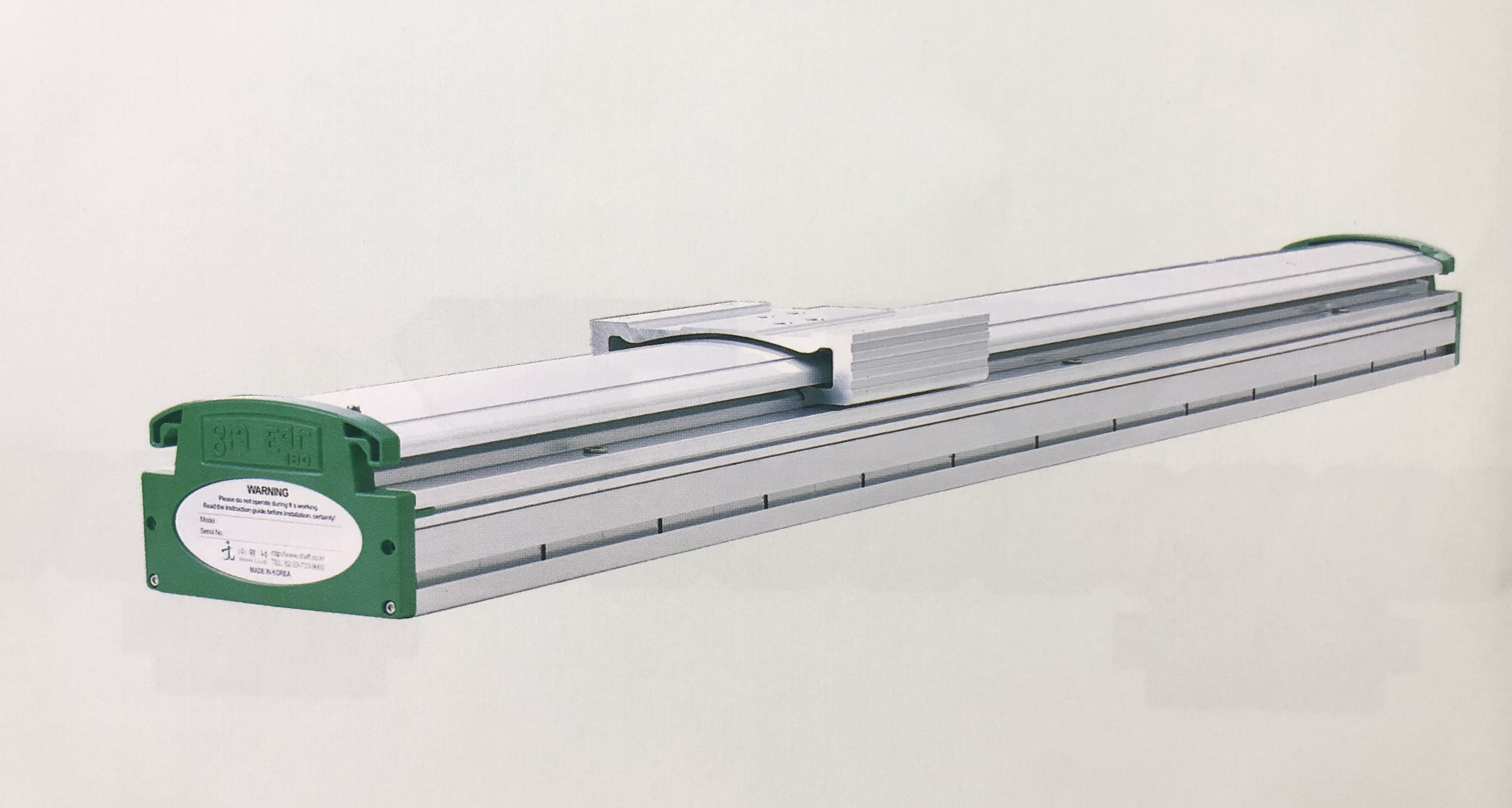
Big Ear 180 직교로봇
기존의 모든 직교로봇(Cartesian robot)은 Ball recirculation(볼 리턴)방식을 사용하는 ball screw와 linear motion guide를 사용하여
서보모터의 회전운동을 직선운동으로 변환시켜 일정한 중량물을 정밀한 직선상에서 위치제어를 한다.
Big-Ear는 V홈으로 연삭된 스크류의 나사산에 볼베어링의 외륜을 좌우 2곳에서 구름운동시키고
Hardened & Ground shaft 상에 8개의 track roller bearing을 구름운동 시켜 서보모터의 회전운동을
직선운동으로 변환시켜 일정한 중량물을 정밀한 직선상에서 위치제어를 한다.
고하중의 중량물을 저소움으로 열발생을 최소화하며 부드럽게 주행하는 구조로 기술의 혁신이 일어난다.
소재의 다양성과 가공의 다양성이 확보되어 향후 각종 산업에 미치는 여향은 지대하다.
특히 가벼운 소재를 활용하여 드론의 자동이송장치나 자동 Loading and Unloading 장치로 활용할 수 있다.