


상세설명
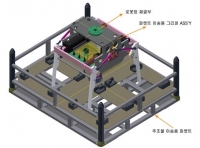
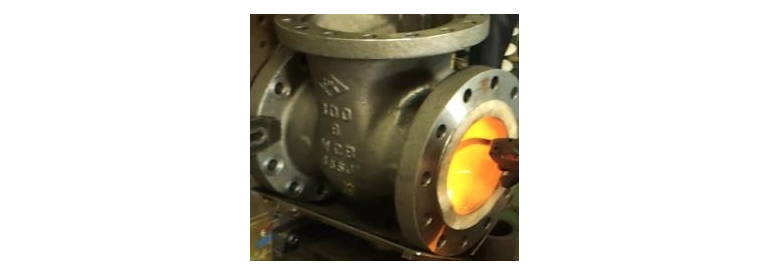
X-Y 2축 로봇에 VISION 및 용접 건이 취부 되어지고 V/V BODY가 모터에 의해 우회전 할 때 위치정보를
스캔 하였다가 용접시 틀어진 값을 보정하여 정확한 위치에 용접하게 함.
현장개선:고하중의 물건을 작업자가 수동으로 클램핑하여 장시간 용접하던 것을 자동으로 하게 함으로써
작업시간의 단축과 용접품질의 향상과 품질관리가 가능케 하였음.


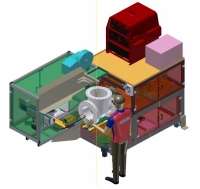
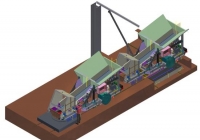
X-Y 2축 로봇에 VISION 및 용접 건이 취부 되어지고 V/V BODY가 모터에 의해 우회전 할 때 위치정보를
스캔 하였다가 용접시 틀어진 값을 보정하여 정확한 위치에 용접하게 함.
현장개선:고하중의 물건을 작업자가 수동으로 클램핑하여 장시간 용접하던 것을 자동으로 하게 함으로써
작업시간의 단축과 용접품질의 향상과 품질관리가 가능케 하였음.




